
Cette étude décrit le mouvement d’une “patte” d’un Hexapod PhanthomX AX Mark II, selon la convention de Denavit-Hartenberg.

Chaine cinématique d’une patte
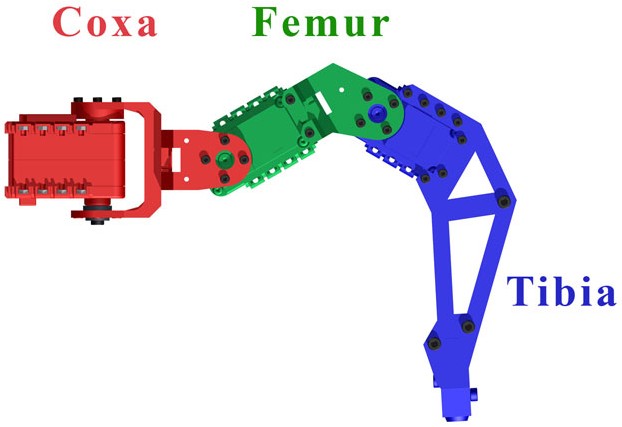
Chaque patte du robot est constituée de trois partie :
- Coxa : Partie fixée au robot pour gérer le placement de la patte,
- Femur : Partie intermedaire permettant de controler la hauteur de la patte,
- Tibia : Partie permettant de gérer l’allongement de la patte.
Calcul du système de référence

Mise en place du MGS : 3R
- 3 rotations :
- 3 constantes :
Tableaux de Denavit-Hartenberg
| Paramètres | liaisons | axe |
| θ | ||
| d | ||
| α | ||
| a |
| Paramètres | liaisons | axe |
| θ | ||
| d | ||
| α | ||
| a |
| Paramètres | liaisons | axe |
| θ | ||
| d | ||
| α | ||
| a |
| Paramètres | liaisons | axe |
| θ | ||
| d | ||
| α | ||
| a |
Calcul des matrices de Denavit-Hartenberg
Voici les matrices déduite des 3 tableaux précédents
On rappel que :
Calcul de la matrice
Calcul de la matrice
Par Jérémy HERGAULT, le .